El rover de exploración polar de investigación de volátiles (VIPER) es parte del programa Artemisa de la Nasa. Sin una guía de viaje de la Luna, los planificadores de misiones están creando nuevos mapas digitales de elevación de alta resolución de la superficie lunar para el rover robótico que llegará a la superficie lunar a finales de 2023 en busca de hielo y otros recursos.
Cuando esté equipado con estos mapas, el rover estará en una mejor posición para atravesar la Luna de manera segura y eficiente mientras busca recursos en el Polo Sur lunar. El hielo es un recurso de particular interés científico, ya que puede tener aplicaciones si se encuentra en el espacio y se convierte en otros recursos para promover nuestra exploración del sistema solar, como el oxígeno y el combustible para cohetes.
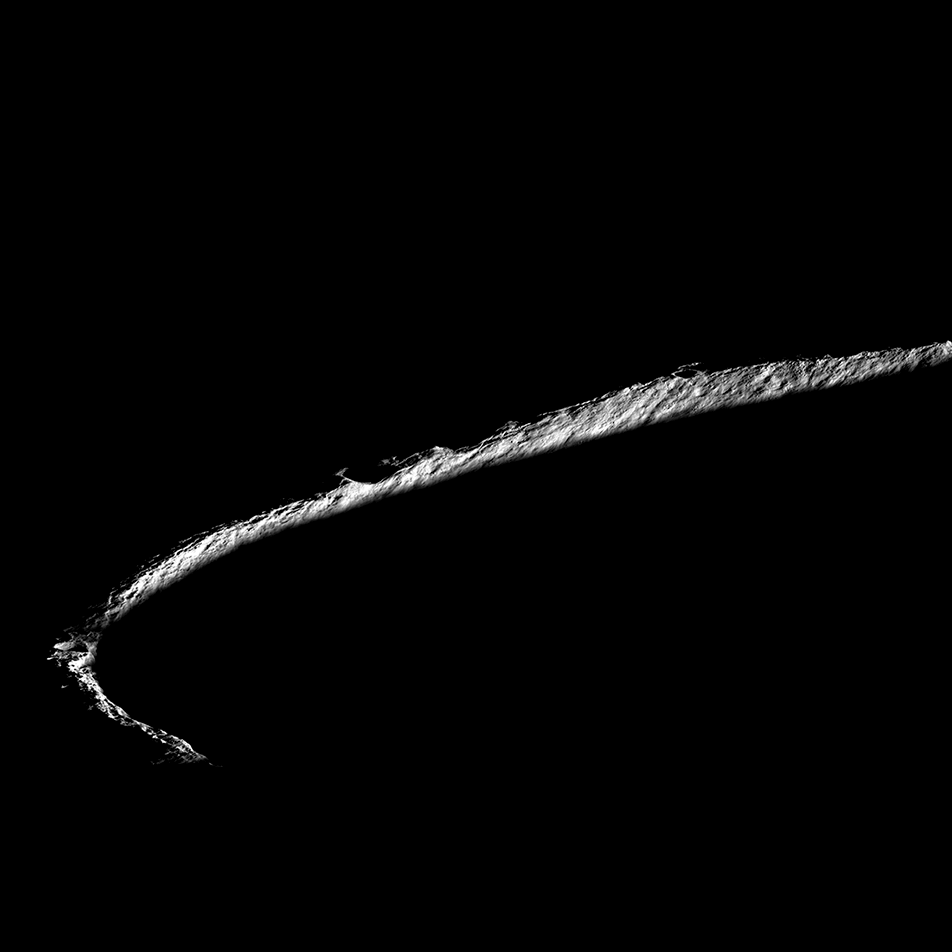
A una escala de aproximadamente un metro, estos mapas proporcionan un modelo 3D de grandes franjas del terreno en el Polo Sur lunar y muestran las condiciones de iluminación y temperatura en constante cambio causadas por largas sombras que barren el paisaje.
Además de evitar que el rover se incline por los bordes de los cráteres empinados, esta vista de cerca de la superficie de la Luna proporciona a los planificadores de la misión información vital para garantizar que las baterías alimentadas por energía solar del rover permanezcan cargadas y guíen al rover hacia lugares seguros para hibernar durante la comunicación por apagones con operaciones de la misión en la Tierra.
«Estamos enviando VIPER a uno de los entornos más dinámicos de la Luna y el rover necesita poder tomar lo que la Luna da», dijo Anthony Colaprete, científico del proyecto VIPER en el Centro de Investigación Ames de la Nasa en Silicon Valley de California. «Por eso estamos creando estos mapas únicos, a escala humana, para ayudarnos a planificar cuidadosamente las rutas del rover mientras opera de manera segura y recopila la mejor ciencia posible».
Los mapas ya están revelando nuevas características de interés científico en la superficie de la Luna, incluidas numerosas «mini trampas frías», que son bolsas sombreadas en la superficie lunar de dos a cinco metros de ancho, que podrían ser lo suficientemente frías para acumular potencialmente hielo. Estas micro trampas frías ofrecen áreas para explorar además de los cráteres mucho más profundos y antiguos que son el foco de la misión VIPER.
«Solíamos pensar en el hielo de agua que se acumulaba sólo en cráteres profundos y oscuros en la Luna», dijo Colaprete. «Pero ahora creemos que incluso los cráteres pequeños y sombreados pueden ser lo suficientemente fríos como para retener moléculas de agua. Estas pequeñas trampas frías son mucho más comunes que sus contrapartes más grandes, por lo que comprender cómo pueden almacenar agua es importante para responder a la pregunta más amplia de cómo el agua se comporta en la Luna».
Para crear los mapas de elevación, un equipo de Ames está utilizando la herramienta de software Stereo Pipeline de código abierto de la Nasa, así como el poder de procesamiento de la supercomputadora Pleiades de Ames para superponer miles de imágenes satelitales tomadas por cámaras a bordo del Lunar Reconnaissance Orbiter (LRO).
Los ingenieros están combinando estas poderosas herramientas y experiencia con una capacidad de procesamiento de fotografías llamada fotoclinometría. Esta técnica, también conocida como «forma a partir del sombreado», combina los ángulos conocidos de la luz solar con los niveles de escala de grises de muchas imágenes bidimensionales para inferir las formas tridimensionales de la superficie lunar. El modelo resultante del terreno lunar permite a los ingenieros calcular cómo se reproducen las luces y las sombras en la superficie en cualquier momento del pasado o del futuro. Por ejemplo, utilizando el modelo, pueden predecir la iluminación en el momento y el lugar en el que aterrizará el rover y planificar los movimientos del rover para mantenerlo a la luz del sol y evitar las sombras.
Con las condiciones de iluminación conocidas, el equipo puede crear mapas de temperatura detallados en el terreno variado, en la superficie y hasta un poco más de 2,5 metros por debajo. Las temperaturas pueden oscilar ampliamente entre 400 grados bajo cero y 170 grados Fahrenheit, lo que hace que la superficie de la Luna sea un tablero de ajedrez de ubicaciones potencialmente prometedoras y muy poco probables para detectar hielo. Equipado con estos nuevos mapas, el equipo puede elegir lugares donde podría haber hielo y enviar a VIPER para que muestre y verifique si aparece hielo y, de ser así, qué tan estable es en diversas condiciones lunares.
«Estos mapas de alta resolución han cambiado por completo nuestra forma de pensar», dijo Kimberly Ennico Smith, científica adjunta del proyecto de VIPER en Ames. «Estamos comenzando a ver cuán extremadamente variadas son las condiciones del suelo en la Luna, incluso dentro de áreas que alguna vez pensamos que eran bastante uniformes. Esto nos permitirá identificar los sitios de perforación del rover con mucho más cuidado y nos llevará a recopilar datos científicos aún mejores».
Los miembros del equipo VIPER responsables de mantener el rover en marcha tienen un gran interés en ver a qué se enfrentará el rover día a día, o más bien minuto a minuto.
«Las sombras se mueven alrededor del Polo Sur de la Luna aproximadamente a la misma velocidad que conduce el rover», dijo Mark Shirley, líder de planificación de operaciones de la misión en Ames. «Tenemos que planificar con anticipación para evitar que VIPER sea superado por la oscuridad; no hay mucho margen de error».