

Ispace, empresa japonesa de exploración lunar, presentó la semana pasada el diseño final de su micro-rover, que será transportado a la superficie de la Luna por su módulo de aterrizaje lunar como parte de las actividades de exploración durante la Misión 2.
El diseño fue revelado por el fundador y CEO de Ispace, Takeshi Hakamada, durante una conferencia de prensa celebrada en Tokio, Japón. “Las operaciones continuas de la misión son esenciales para proporcionar servicios de datos y transporte lunar, por lo que me complace anunciar el progreso que hemos logrado en el modelo de vuelo del módulo de aterrizaje Mission 2 y el diseño final del micro-rover. En particular, estoy orgulloso de todos los empleados que han hecho esto posible, quienes, en el corto tiempo transcurrido desde que completaron la Misión 1 hace casi seis meses, han incorporado las mejoras necesarias para avanzar en esta misión según lo previsto”, dijo el fundador y director ejecutivo Hakamada. “También me gustaría agradecer a todos nuestros socios de HAKUTO-R que se han quedado con nosotros desde la Misión 1, a nuestros nuevos socios, a nuestros accionistas y a todos ustedes que nos han apoyado de diversas maneras. Seguimos haciendo los preparativos necesarios para el lanzamiento de Mission 2”.
La Misión 2, parte del programa de exploración lunar HAKUTO-R, servirá como la segunda demostración tecnológica de la compañía, basada en las lecciones aprendidas de la Misión 1, con el objetivo de validar aún más el diseño y la tecnología del módulo de aterrizaje, así como el modelo de negocio de ispace para proporcionar Servicios confiables de datos y transporte lunar.
Durante la Misión 2, Ispace llevará a cabo actividades iniciales de exploración de recursos, principalmente con su micro rover, que está siendo diseñado, fabricado y ensamblado por ingenieros en su oficina de Ispace en Europa. Las actividades de exploración serán un avance importante para lograr el objetivo y la visión de ispace de establecer la economía cislunar.
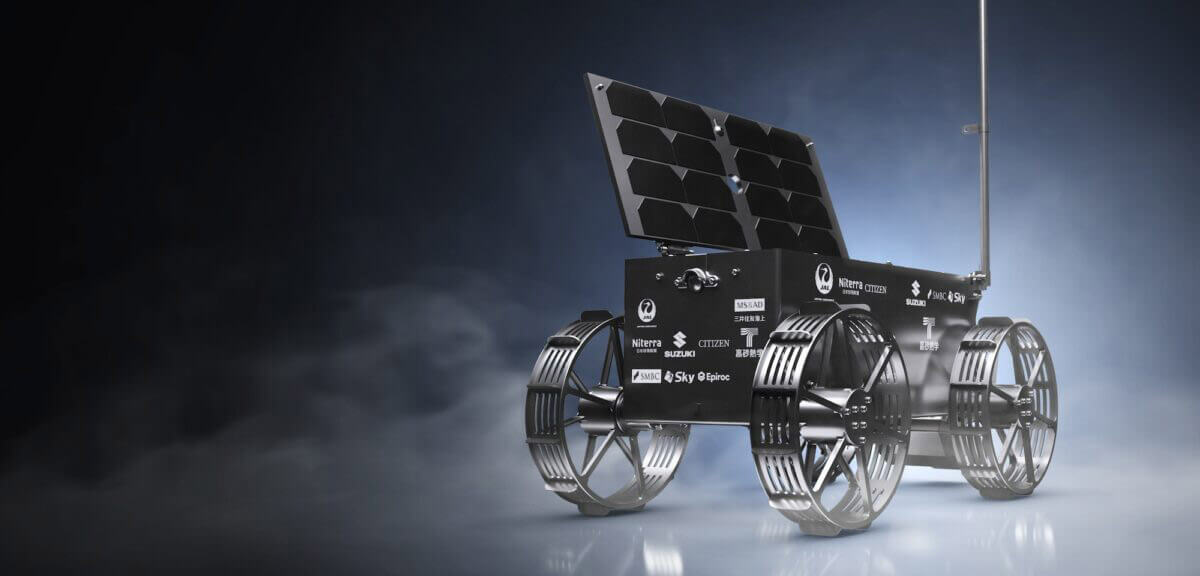
El micro-rover está diseñado para medir 26 centímetros de alto, 31,5 centímetros de ancho y 54 centímetros de largo y pesará aproximadamente cinco kilogramos. Se almacenará en el compartimiento de carga útil en la parte superior del módulo de aterrizaje y utilizará un mecanismo de despliegue para aterrizar en la superficie de la Luna después del aterrizaje. Está diseñado para ser liviano con un marco hecho de plásticos reforzados con fibra de carbono (CFRP) para resistir el lanzamiento del cohete y otras vibraciones durante el tránsito hacia la superficie lunar.
El rover está equipado con una cámara HD montada en la parte delantera que puede capturar imágenes de la superficie lunar. Las ruedas tienen una forma tal que el rover puede atravesar el regolito lunar de forma estable. Los comandos y datos se enviarán y recibirán desde el centro de control de la misión a través del módulo de aterrizaje.












