El mundo de la tecnología ha experimentado un vertiginoso avance en la última década, lo que ha impulsado el desarrollo acelerado de sistemas autónomos en diversas áreas. Los vehículos autónomos, los drones de entrega, los taxis voladores o los robots para asistencia en desastres y exploración espacial son solo algunos ejemplos de las aplicaciones que se han beneficiado de estos avances.
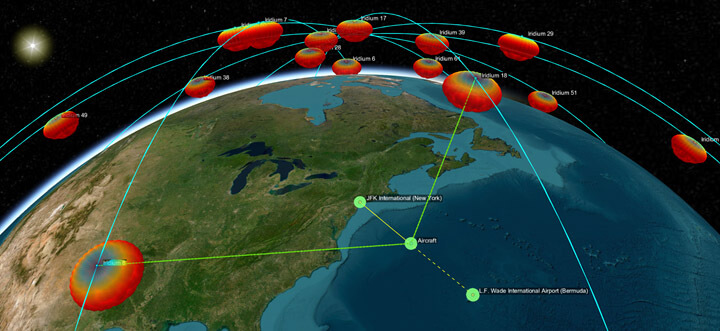
La clave para el funcionamiento seguro y eficiente de estos sistemas radica en su capacidad de percepción precisa del entorno que les rodea. Esto implica la utilización de conjuntos de sensores sofisticados, como radares, cámaras, sensores lidar, ultrasonidos y GPS, que proporcionan información detallada sobre el entorno y la posición del sistema autónomo.
Sin embargo, capturar los datos no es suficiente. Los sistemas de percepción deben procesar las señales de los sensores para detectar, segmentar, etiquetar y realizar un seguimiento de los objetos presentes en el entorno. Esta etapa es crucial para reducir falsas alarmas y mejorar la comprensión del espacio circundante. De hecho, una percepción imprecisa puede tener consecuencias catastróficas y la información errónea podría afectar negativamente la planificación y el control del sistema autónomo.
Afortunadamente, existen herramientas y técnicas que permiten desarrollar y probar estos sistemas de manera efectiva. Las simulaciones, por ejemplo, desempeñan un papel fundamental al permitir la creación de escenarios realistas y casos extremos en entornos controlados y seguros. Estas simulaciones, que pueden ser en 2D o 3D, brindan la posibilidad de probar algoritmos de fusión de sensores y seguimiento, proporcionando un entorno virtual para el perfeccionamiento de estos sistemas.
De hecho, con las herramientas de generación de escenarios, como los de MathWorks, es posible centrarse en casos límite que pueden ser difíciles de capturar con datos registrados a pie de campo. Se pueden configurar escenas complejas y sintetizar detecciones directamente para probar algoritmos y configuraciones que complementen las pruebas en vivo.
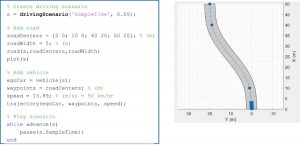
Las plataformas pueden representarse como objetos puntuales u objetos extendidos. La posición, incluyendo la pose y la orientación en el espacio a lo largo del tiempo, se define mediante la asignación de una trayectoria a un objeto. Los objetos pueden tener múltiples firmas que definen cómo interactúan con la simulación del sensor. Se pueden asociar sensores a la plataforma, lo que les permite detectar otras plataformas en el entorno. Una vez que se define el escenario, se puede exportar la escena a un script, como MATLAB, para recrear el mismo escenario de forma programática.
Localización y rastreo de objetos
La localización y el seguimiento de objetos son componentes esenciales en los sistemas autónomos. La capacidad de localizar de manera precisa y en tiempo real al sistema autónomo es crucial para la planificación de movimientos y la interacción con otros objetos. En este sentido, los rastreadores de múltiples objetos se convierten en herramientas clave, ya que permiten seguir y predecir el movimiento de los objetos presentes en el entorno.
Una herramienta destacada en este ámbito es la Sensor Fusion and Tracking Toolbox de MathWorks. Esta herramienta permite el desarrollo de sistemas de localización y seguimiento al simular la posición del vehículo en el espacio. Utilizando la fusión de las entradas de los sensores, esta herramienta proporciona una localización más precisa y robusta. Además, ofrece una amplia gama de algoritmos configurables que permiten el seguimiento de múltiples sensores y objetos, lo que facilita su adaptación a diferentes entornos y tipos de sensores.
El avance de los algoritmos de rastreo es crucial para el desarrollo de vehículos autónomos. Estos algoritmos permiten la detección y seguimiento preciso de múltiples objetos en tiempo real, lo que facilita la toma de decisiones inteligentes y la planificación del movimiento. Además, su configurabilidad, flexibilidad y capacidad de evaluación permiten una mejora continua en su rendimiento, adaptándose a las necesidades y desafíos específicos de cada aplicación.
Para evaluar el rendimiento de los rastreadores, es necesario contar con métricas comunes que permitan cuantificar su desempeño. La Sensor Fusion and Tracking Toolbox proporciona métricas de evaluación de seguimiento de múltiples objetos, incluyendo la posición, velocidad, precisión de la clase y métricas de asociación de pistas. Estas métricas son herramientas valiosas para comparar y evaluar diferentes rastreadores y configuraciones, y ayudan en el proceso de ajuste y mejora de los algoritmos.
Algoritmos de rastreo: un abanico de opciones
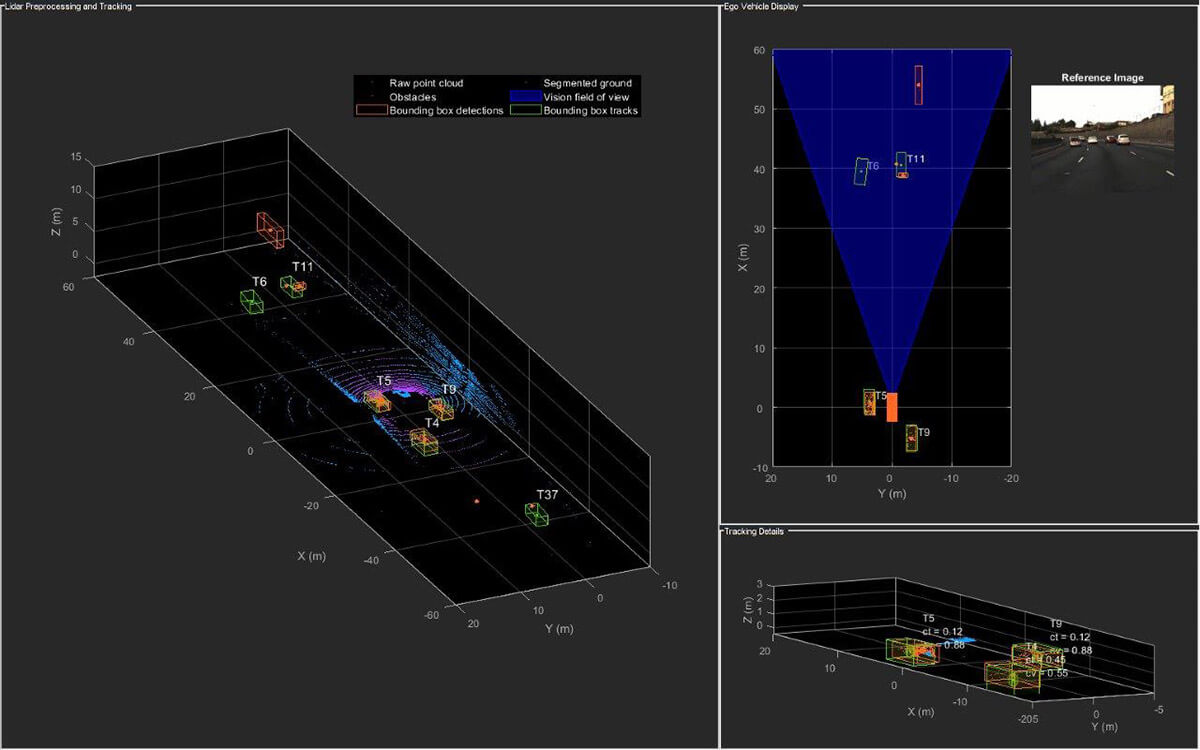
Entre las últimas soluciones prometedoras en el campo del seguimiento de objetos se encuentran los rastreadores de objetos extendidos. Estos rastreadores permiten manejar múltiples detecciones de un solo objeto sin necesidad de agruparlas previamente. Esto resulta especialmente beneficioso, ya que evita la pérdida de información y la formación de pistas falsas o perdidas. Al aprovechar la información de todas las detecciones disponibles, estos rastreadores pueden estimar con precisión la posición, velocidad, dimensiones y orientación del objeto en cuestión.
El seguimiento de objetos extendidos representa un avance significativo en la percepción de los vehículos autónomos. Al superar los desafíos del agrupamiento y proporcionar estimaciones más precisas de posición, velocidad, dimensiones y orientación, estos rastreadores mejoran la capacidad de los vehículos autónomos para comprender y responder de manera segura al entorno circundante.
Sin embargo, queda trabajo por hacer en la mejora continua de los algoritmos de rastreo y en la adaptación a diferentes configuraciones y sensores. La evaluación del rendimiento, la comparación de métricas y la optimización de tiempos de ejecución seguirán siendo áreas de investigación y desarrollo importantes para garantizar un seguimiento preciso y eficiente en entornos complejos y dinámicos.
En resumen, los avances tecnológicos de la última década han impulsado el desarrollo de sistemas autónomos en diversas aplicaciones. La percepción precisa del entorno es fundamental para el funcionamiento seguro y eficiente de estos sistemas y la fusión de sensores y el seguimiento de objetos juegan un papel crucial en este proceso. Con herramientas como la Sensor Fusion and Tracking Toolbox y el avance de los algoritmos de rastreo, se abren nuevas posibilidades para el desarrollo y perfeccionamiento de sistemas autónomos, acercándonos cada vez más a un futuro donde la autonomía sea una realidad cotidiana.
El uso de MATLAB y Simulink en el desarrollo de sistemas autónomos proporciona herramientas poderosas para abordar los desafíos de percepción y planificación. Con una biblioteca de algoritmos y bloques de construcción, se pueden encontrar y personalizar la solución de percepción más adecuada para su sistema autónomo. La capacidad de compartir y reutilizar algoritmos facilita la colaboración y acelera el desarrollo de sistemas autónomos más avanzados y confiables.
Para más información, pulse aquí.