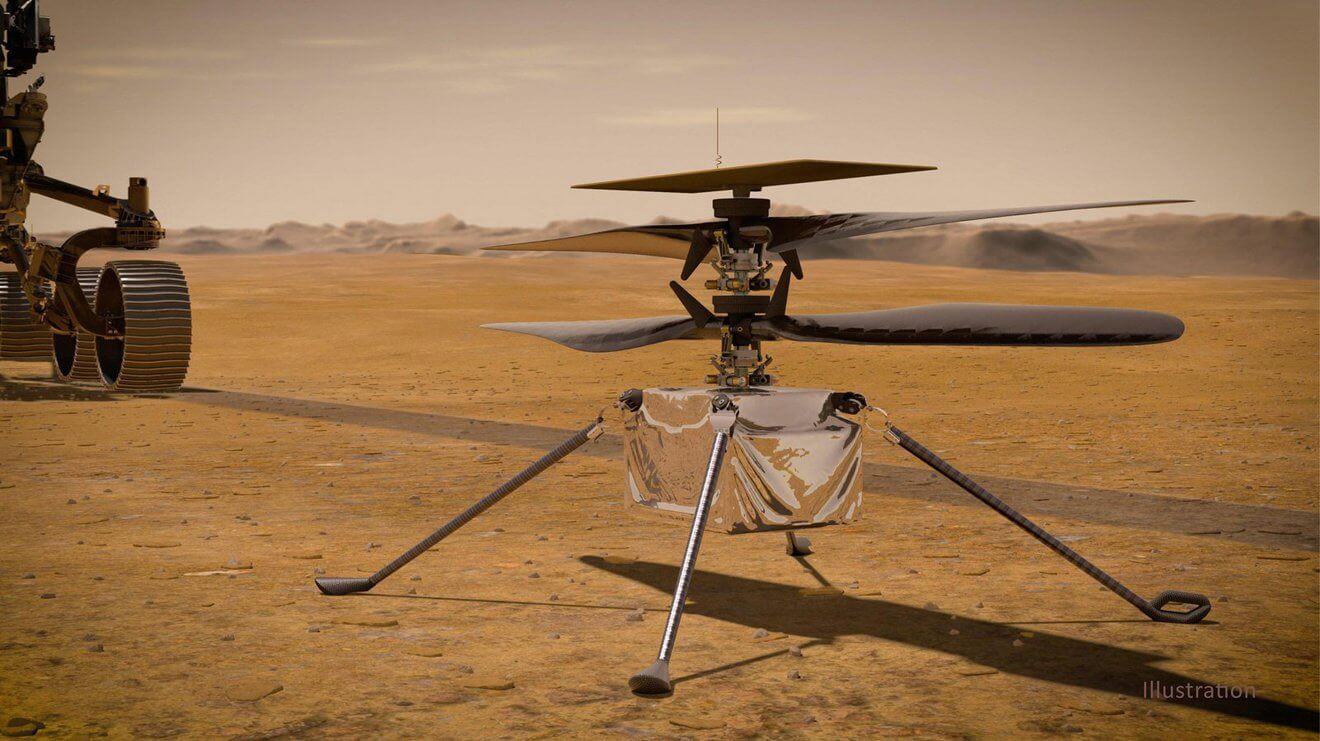
El sexto vuelo del helicóptero marciano Ingenuity registró una anomalía. Aproximadamente 54 segundos en el vuelo, se produjo un error en la canalización de imágenes entregadas por la cámara de navegación. Este fallo hizo que se perdiera una sola imagen, pero lo que es más importante, resultó en que todas las imágenes de navegación posteriores se entregaran con marcas de tiempo inexactas.
A partir de este momento, cada vez que el algoritmo de navegación realizaba una corrección basada en una imagen de navegación, estaba operando en base a información incorrecta sobre cuando se tomó la imagen.
Las inconsistencias resultantes degradaron significativamente la información utilizada para volar el helicóptero, lo que llevó a que las estimaciones se “corrigieran” constantemente para tener en cuenta los errores fantasmas. Siguieron grandes oscilaciones.
A pesar de encontrar esta anomalía, Ingenuity pudo mantener el vuelo y aterrizar de manera segura en la superficie dentro de aproximadamente cinco metros del lugar de aterrizaje previsto. Una de las razones por las que pudo hacerlo es el considerable esfuerzo que se ha realizado para garantizar que el sistema de control de vuelo del helicóptero tenga un amplio «margen de estabilidad».
“Diseñamos Ingenuity para tolerar errores importantes sin volverse inestable, incluidos los errores de sincronización. Este margen incorporado no fue completamente necesario en los vuelos anteriores de Ingenuity, porque el comportamiento del vehículo no coincidía con nuestras expectativas, pero este margen vino al rescate en el sexto vuelo”, asegura la Nasa.