

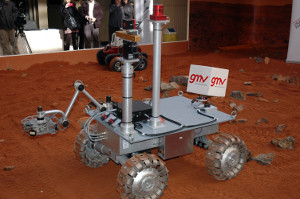
 Madrid.- La empresa española GMV, dentro del proyecto LUCID que lidera para la Agencia Espacial Europea (ESA), prepara una plataforma robótica de pruebas, cuyo objetivo es evaluar el uso y combinación de diferentes herramientas y técnicas necesarias para que un robot autónomo opere de manera eficiente en una región situada en el Polo Sur de la Luna.
Madrid.- La empresa española GMV, dentro del proyecto LUCID que lidera para la Agencia Espacial Europea (ESA), prepara una plataforma robótica de pruebas, cuyo objetivo es evaluar el uso y combinación de diferentes herramientas y técnicas necesarias para que un robot autónomo opere de manera eficiente en una región situada en el Polo Sur de la Luna.
Estas operaciones requieren del desarrollo y pruebas de lo que se suele llamar “técnicas de percepción del entorno”. GMV desarrolla, entre otros, sistemas y tecnología para aplicaciones espaciales. Entre éstos están los sistemas robóticos para exploración planetaria (Luna, Marte) así como todos los elementos involucrados (movilidad, sistemas de orientación/navegación o sistemas de planificación de rutas a través de parajes más o menos agrestes).
La robótica espacial ha sido identificada por los principales actores europeos, como una tecnología clave para el futuro del sector. Tanto la Comisión Europea (por ejemplo, a través de su programa de I+D Horizonte 2020, H2020) como la ESA (por ejemplo, a través de la actividad LUCID, LUnar scenario Concept valIdation and Demonstration), están financiando diferentes desarrollos relativos a "Tecnologías de Robótica Espacial".
Estas operaciones requieren del desarrollo y pruebas de lo que se suele llamar “técnicas de percepción del entorno”. Las primeras pruebas de este complejo sistema autónomo son las que tienen lugar durante las dos semanas después de la Semana Santa en Colmenar Viejo, Madrid, y donde se comprobará el correcto funcionamiento de todos los sistemas del prototipo de robot de exploración planetaria, incluyendo cámaras ópticas, sistemas de estereovisión y sistemas laser para reconstrucción de modelos 3D del terreno, sistemas de navegación nocturna y muchos otros.
El Ayuntamiento de Colmenar Viejo se ha querido sumar al proyecto poniendo a disposición de GMV la Dehesa de Navalvillar, previo respeto de todas las indicaciones recibidas para hacer un correcto uso y minimizar el impacto en la Dehesa, uno de los entornos naturales más apreciados por los vecinos de la Sierra de Madrid para realizar estas pruebas preliminares (“dry run”).
Durante el desarrollo de las pruebas, se han organizado distintos actos de divulgación científico/técnica con estudiantes de un instituto técnico de la localidad.
Tras estas pruebas y en un par de meses, la plataforma robótica LUCID se probará en Tenerife, concretamente en el Parque Nacional del Teide, donde las condiciones orográficas son similares a los paisajes que encontraría dicho robot en ciertas regiones de la Luna o Marte.
Además del proyecto LUCID, GMV lidera otros proyectos de robótica espacial en el marco de la Comisión Europea (H2020): desarrollo del Sistema Operativo para el control de robots espaciales (proyecto ESROCOS); Sistema de Autonomía o inteligencia artificial (proyecto ERGO); coordinación de la Fase de Pruebas de los dos anteriores proyectos y otros más en diversos laboratorios europeos (proyecto FACILITATORS).










