

El rover de exploración polar de investigación de volátiles de la Nasa (VIPER) será el primer robot fuera de la Tierra con su cerebro dividido en dos mientras explora la superficie de la Luna en busca de hielo de agua.
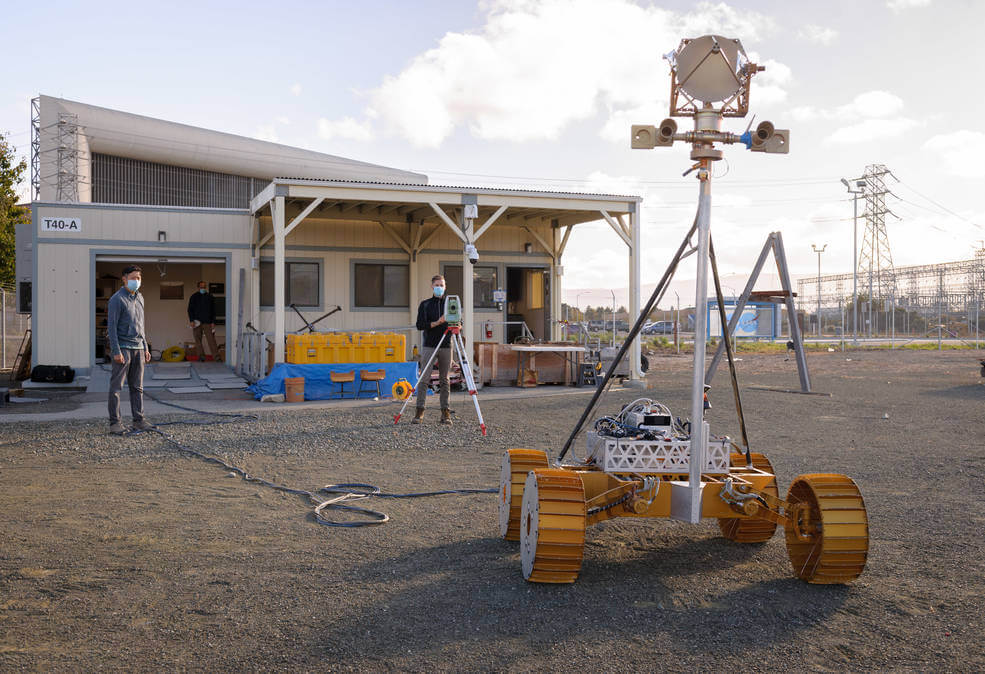
Mientras se mueve a través de la Luna, VIPER funcionará de manera efectiva tanto con el software de vuelo a bordo como con el software terrestre que se ejecuta desde el control de la misión en la Tierra. Utilizando un prototipo de ingeniería del rover, el equipo VIPER comenzó recientemente a poner a prueba el software en un terreno lunar simulado en el Centro de Investigación Ames de la Nasa en Silicon Valley de California.
«Usamos computación distribuida todo el tiempo cuando usamos nuestros teléfonos inteligentes para ejecutar aplicaciones de mapeo que se conectan a servidores y centros de datos lejanos para ejecutar los cálculos», dijo Terry Fong, jefe de técnicos en robótica y adjunto del rover VIPER en Ames. «De manera similar, VIPER realizará gran parte de su procesamiento de datos en computadoras más rápidas en la Tierra, ya que tenemos una conexión relativamente rápida con el control de la misión durante todas las operaciones del rover».
En noviembre, el equipo comenzó a probar la capacidad del software para ejecutar órdenes con éxito con el prototipo de rover. Usando una instalación de investigación y desarrollo de robótica al aire libre con pendientes, rocas y cráteres, llamada Roverscape, el equipo hizo que el software llevara el rover para una prueba de funcionamiento. El rover realizó una variedad de actividades, como girar en su lugar, conducir en línea recta, registrar su posición, ajustar la suspensión y mantener estable la antena mientras se mueve para garantizar que el rover pueda permanecer en contacto con la Tierra.
El prototipo de Unidad Representativa de Gravedad Lunar es una unidad de prueba de ingeniería simplificada que se centra en el sistema mecánico de VIPER, que está especialmente diseñado para permitir a los ingenieros probar cómo se conducirá el rover en gravedad lunar, que es una sexta parte de la de la Tierra.
Debido a la proximidad de la Luna a la Tierra, los retrasos en las comunicaciones son solo cuestión de segundos. Los ingenieros de VIPER están aprovechando esto para descargar imágenes y otros datos del rover para un procesamiento rápido, en lugar de tener que depender solo de la computación a bordo más lenta del rover, que también reduce el coste de desarrollo del VIPER.
Un procesamiento de datos más rápido significa que los equipos científicos y de operaciones de la misión pueden tomar decisiones rápidas sobre la ruta del rover y las actividades científicas. Esto acelerará las operaciones, agilizará los hallazgos científicos y maximizará lo que pueden lograr durante la misión de 100 días de VIPER en el Polo Sur de la Luna.
“Además de los beneficios de la ciencia y las operaciones, mantener una parte del software de VIPER ejecutándose en la Tierra significa que los ingenieros pueden aprovechar lo último y lo mejor en procesamiento de computadoras, almacenamiento de datos y redes”, dijo Hans Utz, ingeniero líder de software de VIPER rover con KBR en Ames.
Además del uso de computación distribuida, VIPER también abrirá camino al ser la primera misión rover planetaria de la Nasa en hacer un uso extensivo de software de código abierto, incluidos componentes clave adaptados de ROS, el Sistema Operativo de Robótica, considerado el estándar de la industria en el desarrollo de robótica. Una vez finalizada la misión, el equipo VIPER tiene la intención de lanzar el software del rover para uso general. Este enfoque permite una forma rápida, ágil y rentable de desarrollar los sistemas de software del rover que también pueden beneficiar a los futuros rovers en la Luna y más allá.
VIPER es una colaboración dentro y fuera de la agencia. VIPER es parte del Programa de Exploración y Descubrimiento Lunar y es administrado por la División de Ciencias Planetarias de la Dirección de Misiones Científicas de la Nasa en su sede en Washington. El Centro de Investigación Ames de la Nasa en Silicon Valley, California, está gestionando el proyecto, liderando la ciencia de la misión, la ingeniería de sistemas, las operaciones de superficie del rover en tiempo real y el software de vuelo. El hardware del rover está siendo diseñado y construido por el Centro Espacial Johnson de la Nasa en Houston, mientras que los instrumentos son proporcionados por Ames, el Centro Espacial Kennedy de la Nasa en Florida y el socio comercial Honeybee Robotics en Altadena, California. La nave espacial, el módulo de aterrizaje y el vehículo de lanzamiento que pondrán a VIPER en la superficie de la Luna serán proporcionados por Astrobotic en Pittsburgh, Pensilvania.













