El desarrollo de sistemas autónomos capaces de coordinar múltiples vehículos no tripulados constituye una de las líneas tecnológicas con mayor potencial para la defensa del futuro. En este contexto, ha arrancado el proyecto FENIX, una iniciativa que tiene como objetivo avanzar en las capacidades de enjambres heterogéneos de sistemas aéreos no tripulados (UAS) mediante la integración de tecnologías de guiado, navegación, control y coordinación autónoma.
El proyecto se desarrolla en el marco del Programa COINCIDENTE, integrado en el Plan Nacional de I+D del Ministerio de Defensa de España y orientado a la búsqueda de soluciones tecnológicas innovadoras de interés para la defensa. La iniciativa cuenta con la participación de UAV Navigation-Grupo Oesía, Alpha Unmanned Systems, FADA-CATEC y AICIA.
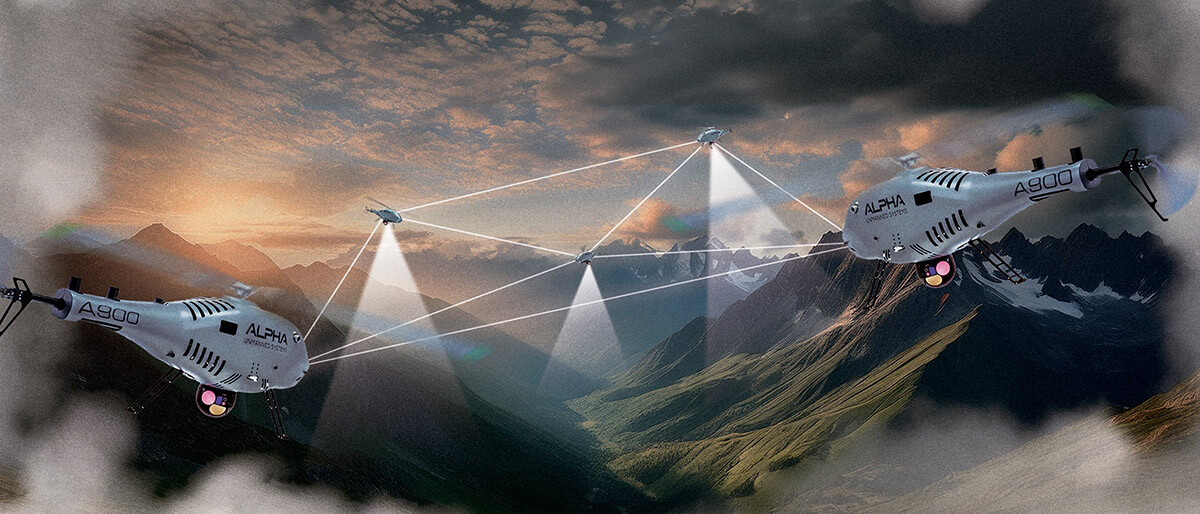
La propuesta combina la tecnología de sistemas avanzados de guiado, navegación y control desarrollada por UAV Navigation-Grupo Oesía con las plataformas de vuelo de Alpha Unmanned Systems, empresa que lidera el proyecto. A partir de esta base tecnológica, los socios trabajarán en el diseño, desarrollo y validación de un demostrador tecnológico capaz de gestionar de forma autónoma la coordinación de enjambres compuestos por diferentes tipos de vehículos aéreos no tripulados.
El objetivo principal de FENIX es desarrollar un sistema autónomo de control y coordinación que pueda ser validado tanto mediante simulaciones como a través de campañas de vuelo reales. La iniciativa busca dotar a los enjambres de UAV de capacidades de inteligencia colectiva alineadas con las necesidades operativas de la doctrina militar, permitiendo mejorar la eficacia y la eficiencia de las misiones en escenarios complejos y disputados.
Entre los desarrollos previstos figura la creación de un sistema avanzado de coordinación y planificación capaz de replantear las misiones en tiempo real ante situaciones imprevistas. Asimismo, el proyecto contempla el desarrollo de un sistema de percepción cooperativa basado en la integración de información procedente de múltiples sensores embarcados en los distintos UAV del enjambre. Esta capacidad permitirá mejorar la precisión en la detección de objetivos y aumentar la robustez operativa frente a oclusiones, ocultaciones o condiciones meteorológicas adversas.
Otra de las áreas clave de trabajo estará orientada a las misiones críticas. El sistema deberá ser capaz de identificar y cartografiar zonas de interés en entornos afectados por interferencias o suplantaciones de señales GNSS, así como en escenarios sometidos a amenazas NRBQ. Además, se prevé su aplicación en tareas de patrulla, exploración, adquisición de objetivos y operaciones de búsqueda y rescate.
Uno de los aspectos diferenciales de FENIX reside en el empleo de enjambres heterogéneos, integrados por plataformas con capacidades distintas que actúan de manera coordinada. Este enfoque permitirá distribuir las tareas de forma más eficiente y optimizar el rendimiento global de la misión. El operador únicamente tendrá que definir el objetivo a través de una interfaz hombre-máquina única, mientras que el sistema se encargará automáticamente de descomponer la misión en tareas individuales, asignarlas a cada vehículo según sus capacidades y generar trayectorias seguras y viables teniendo en cuenta factores como las restricciones cinemáticas, la autonomía energética o el alcance de las comunicaciones.
Los responsables del proyecto consideran que esta combinación de inteligencia embarcada, autonomía y coordinación avanzada representa un paso significativo en la evolución de los sistemas aéreos no tripulados para aplicaciones militares. Basado en la tecnología GNC de UAV Navigation-Grupo Oesía y en las plataformas de ala rotatoria de Alpha Unmanned Systems, FENIX aspira a proporcionar una herramienta robusta y eficiente para operaciones de vigilancia, inspección y exploración en entornos de elevada complejidad operativa.